- Introduzione
Cuba, 2009: Fidel Castro, storico leader della rivoluzione cubana, è ancora in carica e anche alla fine dell’anno appena trascorso ha voluto parlare ai suoi compatrioti. L’ha fatto con un comunicato affidato al fratello Raul, attuale ‘primo ministro’ del longevo ‘governo’ dei Castro. Fidel il 18 febbraio 2008, dopo 49 anni di presidenza, ha dichiarato che non avrebbe accettato una nuova elezione alla Presidenza del Consiglio di Stato e del consiglio dei Ministri, delegando di fatto il fratello Raul. Fidel, ancora oggi, continua a ricoprire la carica di Segretario del Partito Comunista Cubano, carica importante e decisiva in un paese di fatto governato militarmente da un regime comunista. Castro non appare dal vivo praticamente da quando fu operato urgentemente all’intestino, continuando però a scrivere sull’organo del partito comunista cubano, il quotidiano Gramma, e ad apparire in alcuni video propagandistici. Il peso che Fidel, che la sua immagine di uomo, ha a Cuba è centrale per un paese comunista nel cuore del dominio politico USA in quell’area. Fidel Castro è l’icona che regge i giochi di potere a Cuba, dopo Fidel il potere dei Castro non sarà più lo stesso. Ma chi ci dice che Fidel Castro sia ancora vivo? Quali prove abbiamo? Un’ipotesi affascinante e del tutto verosimile, se non oggi sicuramente fra pochi anni, è quella della clonazione robotica. E se Fidel, quello del 2008 e quello del prossimo anno, fosse in realtà una fedele riproduzione bioingegneristica capace di simulare il leader maximo nei video propagandistici, al fine di mantenere presente la sua figura e saldo il potere? Raul Castro, attuale governante, agisce e parla sempre in nome del grande partito che suo fratello presiede. Raul si appoggia sempre al tema della ‘rivoluzione’, alle soglie del cinquantenario, di fatto esaltando la figura del fratello Fidel che ne fu il principale protagonista. Così nel suo discorso di fine anno:
Il nostro impegno per il prossimo anno dovrà essere caratterizzato dalla sistematicità; l’organizzazione, la pianificazione e il controllo effettivi; lavorare per priorità e usare razionalmente le risorse; incrementare la produttività del lavoro e l’efficienza; rafforzare l’integrazione, la cooperazione e la coesione nell’attività di direzione degli organismi dello Stato, il Governo, l’Unione dei Giovani Comunisti e le organizzazioni di massa a tutti i livelli, per affrontare congiuntamente, sotto la direzione del Partito, i principali problemi che oggi affliggono il nostro popolo. In nome del Comandante in Capo, del Comitato Centrale del Partito e dei componenti di quest’Assemblea, trasmettiamo ai nostri compatrioti meritate felicitazioni per quanto abbiamo fatto […][1].
Prendere in considerazione la possibilità del Fidel robotico utilizzato strumentalmente dalla dinastia Castro per mantenere il potere su Cuba è del tutto legittimo alla luce dei risultati odierni della bioingegneria. Esistono vari esempi di robot umanoidi in grado di imitare perfettamente l’essere uomini, dal punto di vista estetico, motorio ed espressivo. Al di là di Cuba e dei Castro, questo articolo si pone l’obiettivo di vagliare criticamente gli attuali risultati della moderna ingegneria, sia dal punto di vista della psicologia cognitiva sia dal punto di vista della bioetica. È realistico pensare che la bioingegneria possa clonare un essere umano, riproducendolo artificialmente e in maniera così perfetta da creare una copia funzionalmente dotata della medesima efficacia dell’originale? Un clone robotico di Fidel Castro alla guida del Partito Comunista Cubano saprebbe ingannare il popolo e preservare il potere dei Castro?
- Tecnologie
Il paragrafo precedente si chiude con una domanda che potrebbe apparire puramente teorica o speculativa, se non la si confrontasse con le reali possibilità che l’ingegneria applicata alla tecnica è in grado di produrre oggi. È necessario dunque fare chiarezza sulle reali e attuali possibilità delle tecnologie bioingegneristiche. Non essendo possibile, per ovvi motivi, individuare ogni device sperimentato nei molti laboratori dei più importanti centri di ricerca, mi limiterò in questa sezione, alla presentazione di alcune tecnologie sviluppate dell’Università di Pisa cercando di mettere a fuoco il loro funzionamento e le loro potenzialità. Cominciamo dunque da alcuni strumenti in grado di riprodurre virtualmente o fisicamente, con un notevole grado di fedeltà, una parte o più parti di un essere umano e il loro movimento. Queste tecnologie sono state realizzate con finalità molto diverse l’una dall’altra; nonostante ciò esse sono accomunate dalla medesima caratteristica: tutte quante rappresentano una copia di qualcosa di umano.
Esistono differenti tipologie di dispositivi capaci di riprodurre il corpo umano o una parte di esso. Quelli presi in esame in questo articolo sono tre, tutti sviluppati o in uso al Centro Interdipartimentale di Ricerca ‘E. Piaggio’ dell’Università di Pisa:
- Avatar della mano
- Sistema cinestetico indossabile per la ricostruzione della postura e della gestualità
- Androide che simula un busto femminile
- a. Avatar della mano
Questo avatar è un modello realistico di una mano, osservabile su di uno schermo e dotato di tutte le caratteristiche estetiche e motorie di una mano reale. È stato progettato e sviluppato un modello Client-Server per la gestione e l’elaborazione delle variabili biomeccaniche e per la visualizzazione della cinematica di una mano.
Si tratta di uno strumento software in grado di rappresentare in grafica 3D i movimenti della mano, una volta che gli sono forniti in ingresso i dati relativi agli angoli. Questo significa che è adattabile a qualsiasi sistema di monitoraggio del movimento della mano, purché fornito di un’interfaccia che presenti i dati nella forma adatta.
Ad esempio, l’avatar (Fig. 1)
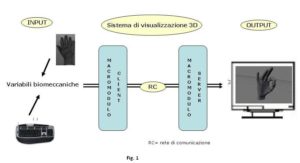
può essere integrato con il guanto sensorizzato mediante elastomeri conduttivi, così da poter gestire i movimenti della mano sullo schermo mediante quelli della mano reale che indossa il guanto. Potremmo definire un dispositivo di questo tipo un simulatore in diretta dei movimenti e della postura di una mano reale, basato su tecnologie indossabili che permettono la cattura dei movimenti reali.
- b. Sistema cinestetico indossabile per la ricostruzione della postura e della gestualità
L’avatar sopra descritto è un simulatore in virtù del lavoro dei sistemi di rilevazione delle variazioni posturali della mano. Infatti, all'interno dei laboratori del Centro Interdipartimentale di Ricerca ‘E. Piaggio’ è stato ideato un innovativo sistema d’indumenti sensorizzati per il monitoraggio della forma, della postura e della gestualità di porzioni del corpo umano. Gli indumenti fabbricati utilizzano materiali tali da permettere una elevata aderenza e adattamento meccanico alla superficie corporea, sono sistemi indossabili non ingombranti, flessibili e confortevoli, che possono essere portati a lungo senza disagio. La porzione sensorizzata è ottenuta letteralmente ‘spalmando’ con tecnica serigrafica un elastomero elettricamente conduttivo (Elastosil LR 3162 della Wacker LTD.). In questo modo viene mantenuta la vestibilità dell'indumento, andando a conferirgli delle proprietà piezoresistive che lo rendono sensibile alle sollecitazioni meccaniche.
Occorre osservare che nel prodotto finale sia i sensori sia i fili di interconnessione sono realizzati con lo stesso materiale conduttivo, in un singolo processo di stampa e manifattura, senza dover ricorrere a fili metallici rigidi, preservando la libertà di movimento. Una delle innovazioni più importanti del sistema è la possibilità di realizzare in modo abbastanza semplice una rete ridondante di sensori distribuiti sulla superficie del tessuto a differenza delle tradizionali interfacce di monitoraggio, dotate di pochi sensori e poco adattabili alle variazioni della superficie corporea del soggetto. Il gran numero di sensori finale comporta, tuttavia, una notevole quantità di collegamenti e lunghi tempi di elaborazione in fase di analisi dei dati. Un tale sistema di rilevazione dei dati di deformazione della superficie corporea si configura come uno strumento essenziale per la clonazione dei movimenti e della gestualità.
- c. Androide che simula un busto femminile
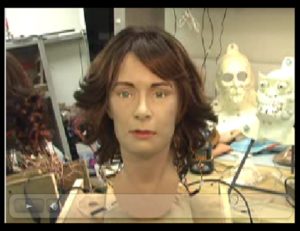
L’ultimo in esame è l’androide capace di simulare l’espressività facciale umana. Sono due gli androidi di cui disponiamo: il primo, denominato FACE, completamente artigianale e in corso di continue modifiche per la massima customizzazione, è realizzato in collaborazione con l’Accademia delle Belle Arti di Carrara sotto la guida del prof. Piero Marchetti; l’altro, denominato ALICE, è un prodotto commerciale della Hanson Robotics recentemente acquistato dal centro di ricerca.
Si tratta di automi facciali prossemici interattivi, dotati di un volto antropomorfo con il quale è possibile gestire la comunicazione. La struttura di entrambi è simile: hanno una scocca che costituisce lo scheletro, sul quale poi è posizionata la ‘pelle’, che per FACE è un materiale siliconico comunemente usato nel cinema, mentre per ALICE è un polimero elastico, brevettato dalla Hanson Robotics (Frubber™), che offre maggiore resistenza e maneggevolezza. Grazie a una serie di cavi in acciaio opportunamente tesi da micro servomeccanismi, i due sistemi sono in grado di muovere il collo ed emulare il movimento della muscolatura facciale umana e quindi la sua espressività facciale.
Ad esempio, ALICE (Fig. 2) è dotata di 19 gradi di libertà:
- Sorriso e cipiglio
- Sogghigno beffardo
- Aggrottamento della fronte
- Aggrottamento a destra
- Aggrottamento a sinistra
- Ammiccamento oculare
- Occhi verso l'alto
- Occhio sinistro a sinistra
- Occhio destro a destra
- Sogghigno beffardo bilaterale
- Strabismo lato sinistro
- Strabismo lato destro
- Labbra inferiore movimento verticale
- Labbra superiore movimento verticale
- Contrazione dei muscoli guanciali e oculari
- Movimento rotatorio della testa
- Annuire della testa
- Inclinazione della testa
- Apertura\chiusura delle guance
Di fronte a questa considerevole quantità di gradi di libertà, la ricerca intorno a questo tipo di simulatore umano procede con l’obiettivo futuro di rendere questa tipologia di robots indipendenti dal diretto controllo umano, ovvero pensati per avere un basso grado di autonomia. È tuttora oggetto di ricerca un nuovo sistema di controllo dei movimenti, basato su un neuro-controllore bio-ispirato (Field Programmable Gate Array), così da poter gestire in modo totalmente automatizzato l’attuazione dell’androide.
Questi tre devices costituiscono un esempio di come già oggi la tecnologia ingegneristica riesca a creare cloni fedeli. Si tratta di copie in grado di ingannare il nostro sistema percettivo. Questi cloni sono a tutti gli effetti in grado di ingannare la percezione umana, sollevando problemi di natura etica. Di questo mi occuperò solo di sfuggita. Infatti in questa sede intendo sollevare una questione centrale: come può la copia riuscire a superare l’originale, tanto da ingannare la percezione e ridefinire l’identità stessa dell’originale? Come può un Fidel Castro robotico guidare Cuba ridefinendo la figura del vero Fidel (dopo la sua morte) a favore della dinastia Castro? Può la copia essere più efficace del suo originale?
- Percezione e persuasione
La bioingegneria è riuscita a produrre copie in grado di simulare alla perfezione l’estetica e il movimento umano. Con uno sforzo d’immaginazione potremmo ipotizzare un esperimento sulla percezione in cui si chieda di distinguere tra la faccia di una cavia umana che in un filmato esprime un’emozione e la faccia di Alice che in un secondo filmato replica la medesima emozione espressa dalla cavia. Chi saprebbe distinguere tra Alice e la cavia? Su quale base è possibile distinguere un’espressione umana da un’espressione robotica, copia perfetta di quella umana?
L’importanza della credibilità dell’aspetto fisico per l’interazione uomo-macchina è stata evidenziata dai primi studi di Mashiro Mori, la cosiddetta ‘uncanney valley’. Per favorire l’accettabilità di un prodotto è determinante il ruolo giocato dall’estetica, specie se si tratta di realizzare un robot destinato a interagire con gli esseri umani. L’esperto giapponese di robotica ha posto una delle linee guida più seguite per la progettazione di robots umanoidi. Secondo l’ipotesi di Mori, all’aumentare dell’antropomorfismo di un oggetto aumenta anche la risposta emotiva dell’essere umano che lo osserva. Accade ogni giorno che gli esseri umani si trovino coinvolti tra loro in relazioni intersoggettive, imbattendosi in prima istanza nella più immediata e superficiale delle fonti di informazione riguardo al proprio interlocutore: il suo aspetto fisico. Tuttavia, per ciò che concerne i robots nell’interazione con gli umani, realismo e grado di accettabilità non sono direttamente proporzionali. Nel grafico di Mori esiste una zona, detta ‘uncanney valley’ (calcolata sulla base di un parametro di accettabilità estetico/motoria), in cui la risposta emotiva dell’osservatore precipita drasticamente. In corrispondenza di questa zona del grafico, l’osservatore ha esperienza di un robot quasi perfettamente umano ma per niente tale, in quanto poco credibile sia dal punto di vista estetico sia da quello motorio. In seguito, il grafico descrive una curva che sale in coincidenza dell’interazione con robots perfettamente umani. In una scala che va dal robot like-robot (LR) al robot like-human (LH) si osserva una reazione di repulsione nell’osservatore quando il robot è nel periodo intermedio tra il quasi perfettamente LH e il perfettamente LH, fase che si caratterizza per la sua non-verosimiglianza. Da un robot che somiglia alla perfezione a un uomo ci si aspetta un comportamento umano. Per questo motivo, un robot quasi perfettamente umano non riscontra il gradimento dell’osservatore umano. In altre parole, potremmo dire che il robot like-human imperfetto è visto dall’essere come un ‘mostro’, inteso come ciò che sta la confine fra l’umano e il non umano. Tale copia mostruosa ha un effetto perturbante sull’osservatore che non sa come porsi nei confronti della propria immagine deformata e cosa aspettarsi da essa.
Dal grafico di Mori risulta che l’effetto di un oggetto artificiale antropomorfo su un osservatore umano è inferiore se paragonato a quello derivante dal suo movimento. Un esempio in letteratura è quello di una protesi per arto superiore. Essa sembra vera, è esteticamente credibile e può essere confusa con un braccio reale. Nonostante ciò, nel momento in cui viene scoperta come protesi durante una stretta di mano, genera un sentimento di disagio.
Seguendo la linea di Mori, la credibilità estetico/motoria di un robot umanoide è ciò che permette all’uomo di entrare in relazione empatica con la macchina. Riconosciamo al robot antropomorfo la dignità di essere umano sulla base della sua credibilità estetica. La tesi di Mori rafforza l’ipotesi che sia possibile ingannare un essere umano usando un clone robotico che riproduce fedelmente, sia dal punto di vista estetico sia dal punto di vista motorio, un particolare essere umano, Fidel Castro ad esempio. L’ipotesi, per quanto fantasiosa, resta in piedi insieme al problema etico che porta con sé.
- Il mondo delle copie
Da quanto è stato detto fin qui emerge chiaramente che i devices prodotti dalle tecnologie bioingegneristiche sono in grado di mettere in scacco la nostra capacità di discernere l’umano dal non-umano, il naturale dall’artificiale, la copia dall’originale. Ciò che è filosoficamente interessante è che i nuovi artifici della tecnologia ci spingono a riflettere in modo sempre più concreto sul significato e la distinzione di termini che sembrano non avere più la solidità di un tempo. Che cos’è una copia? Quale relazione intercorre fra modello e rappresentazione? Che cosa ci permette di distinguere l’originale dal suo clone? Le domande inquietanti che ci eravamo posti all’inizio non hanno trovato una risposta, al contrario si amplificano man mano che ci addentriamo nel dominio della riproduzione e della rappresentazione. A questo punto, non è più possibile tirarci indietro barricandoci nelle nostre certezze, dobbiamo accettare l’invito ed entrare nel ‘mondo delle copie’.
Questa volta però ritengo opportuno seguire un altro percorso, per cui non mi affaccerò su quel ritaglio di presente che si proietta sul futuro, al contrario procederò facendo, per così dire, un passo indietro nel tentativo di cogliere il nodo problematico fra copia e originale alle sue origini, ammesso che di origini si possa ancora parlare.
Dicono che Zeusi, pittore greco noto per l’abilità nel chiaro scuro, una volta si misurò con Parrasio, artista di altrettanto valore. Il primo, volendosi assicurare la vittoria, dipinse un grappolo d’uva talmente realistico che gli uccelli vi si posarono sopra per beccarlo. Così, terminata l’opera, convinto di avere praticamente già vinto, chiese che gli si aprisse la tenda che vedeva in lontananza perché potesse riposarsi. Ma cadde in errore: quella che gli sembrava essere una tenda era il dipinto del suo sfidante[2].
Il famoso aneddoto riportato da Plinio il vecchio nella Naturalis Historia mette in luce in modo esemplare la concezione antica dell’arte figurativa: la pittura è tecnica dell’illusione[3]. L’artista mescolando i colori secondo misura e proporzione imita la realtà producendo un duplicato del mondo.
Circa due millenni ci separano dall’autore latino, eppure le cose che egli scrive sull’imitazione non sembrano molto lontane da come noi oggi intendiamo il dominio delle copie e delle riproduzioni. Non mi soffermerò su queste pagine a mettere in luce come il nostro mondo sia dominato da copie, doppioni, imitazioni, riproduzioni più o meno fedeli. Basta accendere la televisione per prendere atto dell’ennesima truffa telematica ottenuta attraverso la clonazione di carte di credito, uscire di casa e imbattersi agli angoli di strada in venditori ambulanti, non del tutto autorizzati, che offrono a buon mercato imitazioni di borse o di orologi dal marchio contraffatto. Potrei proporre molti altri esempi e osservare che questo stesso testo scritto non è che la copia di un file battuto al computer, per esprimere, in fin dei conti, ciò che è noto a tutti: viviamo un mondo di copie.
Ciò che però ci differenzia dagli antichi descritti da Plinio sta nel fatto che l’arte di imitare e di replicare il mondo non è dominio dell’ambito artistico-estetico, le copie a poco a poco stanno entrando in ogni settore della nostra vita dalle telecomunicazioni al diritto, dalla moda all’economia. Servirsi di copie rende la nostra vita più semplice, ma al tempo stesso è causa spesso di seri problemi.
L’aneddoto da cui siamo partiti descrive bene il rischio a cui ci espone una copia ben fatta: vale a dire, confondere l’imitazione con l’originale. Al pari di Zeusi possiamo essere indotti a confondere il piano della realtà con quello della rappresentazione illusoria.
L’elemento perturbante che contraddistingue e caratterizza il dominio delle copie sembra dunque essere l’illusione, la quale il più delle volte nasconde un’intenzione di frode. Possiamo osservare che in estrema sintesi ciò che ci fa essere diffidenti verso le copie è la loro particolare capacità che queste hanno di illuderci e ingannarci. Al pari di un trompe l’oeil la copia tende a confondersi con l’originale, o a sostituirsi a esso, mettendo in scacco la nostra capacità di discernere il vero dal falso.
In ogni caso, se ci pensiamo bene, quello che abbiamo descritto come il fattore perturbante delle copie, all’interno del rapporto copia-originale, rappresenta al tempo stesso l’elemento rassicurante. Se infatti temiamo di prendere l’imitazione per il modello significa che fra i due termini della relazione esiste un’irriducibile distanza: la copia per quanto perfetta non potrà mai essere uguale all’originale. La relazione che viene a porsi è fortemente gerarchizzata: il modello per definizione non potrà mai essere eguagliato all’imitazione. Una copia forse riuscirà a strabiliare per la sua estrema fedeltà all’originale, ma non potrà mai eguagliarlo in tutto e per tutto, soprattutto non potrà mai superarlo in perfezione, in quanto la copia, potremmo dire, è ontologicamente inferiore.
Tra realtà e rappresentazione dunque sembra innalzarsi un muro, una barriera concettuale forte, che puntella le nostre certezze.
Ma che cosa accadrebbe se questo muro crollasse? Se fra copia e originale venisse a perdersi qualsiasi differenza? Se addirittura il rapporto gerarchico che vede l’originale inevitabilmente più potente della copia dovesse invertirsi?
Con questi temi si è da sempre cimentata la letteratura fantascientifica e nel secolo scorso anche la cinematografia, ma siamo sicuri che le domande poste siano puro dominio della la fantascienza? Le copie che conosciamo e produciamo ci destabilizzano, o ci rassicurano? Hanno un grado di autonomia tale da metterci in discussione, oppure sono sotto il nostro completo controllo?
- Forme di imitazione
La questione ci spinge a ritornare alle origini del concetto di mimesis e alla teoria dell’imitazione del primo filosofo che ha approfondito il rapporto copia-originale: Platone.
All’inizio del X libro della Repubblica, come è noto, Socrate introduce il discorso sulla mimesis attraverso una metafora che mette in relazione un oggetto e i suoi imitatori. Se prendiamo in considerazione l’idea di tavolo, un tavolo costruito da un artigiano e la rappresentazione di un tavolo dipinto su tela, noteremo immediatamente una differenza sostanziale fra i tre oggetti. Il primo è il modello a cui gli artigiani si ispirano, il secondo rappresenta l’oggetto fabbricato, copia più o meno adeguata all’originale, mentre il quadro dipinto è copia del tavolo prodotto e quindi copia della copia. Secondo il filosofo i tre oggetti sono in relazione gerarchica fra loro in base al contenuto di verità che ciascuno contiene[4].
L’idea, secondo Platone, rappresenta la verità: il manufatto e il dipinto possono tentare di avvicinarvisi anche se non saranno mai nella condizione di eguagliarla[5]. Socrate opera una distinzione qualitativa fra il tavolo fabbricato e quello dipinto, entrambi possono definirsi copie, ma sono più o meno simili all’originale, o meglio più o meno veri[6]. Il tavolo fabbricato e quello dipinto appartengono a due forme di imitazione differenti: una di natura estetica e un’altra di tipo tecnico-produttivo, che potremmo definire poietica.
A questo punto per far chiarezza sulle due forme della mimesis (estetica e poietica) è necessario approfondire il rapporto fra il pittore e l’artigiano[7]. Ci troviamo subito di fronte a un’ambiguità: rispetto all’azione entrambi si possono dire imitatori; tuttavia in riferimento agli oggetti da essi prodotti non si possono definire nella stessa maniera: il titolo di ‘mimetes’ si addice solo al pittore[8]. Il fabbricante di tavoli, infatti, per via della sua capacità di produrre oggetti, viene accomunato, dal filosofo, al creatore dell’idea (phytourgos) di tavolo, entrambi infatti creano oggetti, anche se di valore nettamente diverso. In breve l’artigiano appare, al contempo, sia imitatore che creatore (demiurgos), mentre il pittore non è che mimetes.
Ma se entrambi producono copie imperfette perché questa differenza fra i due? A mio parere la questione è strettamente connessa al tema dell’illusione e dell’inganno proprie della mimesis. Per Platone l’inganno prodotto dal dipinto si genera nel momento in cui la copia pittorica, non più percepita come tale, si sostituisce all’originale. Come accade nel racconto di Plinio, Zeusi scambia il quadro dipinto dal rivale per la realtà, ma la tenda in cui desidera riposarsi non ha entrata. La copia quindi risulta ingannevole perché sebbene dia la parvenza di essere sullo stesso piano dell’originale non riesce in nessun modo a svolgerne il ruolo[9]. Per questo motivo Platone considera la pittura un’arte imitativa illusoria e ingannevole[10]. Il sostituto pittorico, ad esempio il trompe l’oeil, dunque non è la copia inadeguata rispetto all’originale: esso, al pari di una tenda dipinta, indica la completa assenza dell’originale.
Verso l’altra forma di imitazione, quella che ho chiamato mimesis poietica, Platone sembra esprimere un’opinione differente. Come è stato detto sopra, anche l’artigiano è un imitatore, in quanto nel produrre un tavolo si riferisce a un modello; tuttavia le copie da lui prodotte non sono da ritenersi pericolose. Un tavolo costruito da un falegname è uno dei tanti tavoli, con i suoi pregi e i suoi difetti, difficilmente potrebbe essere confuso con l’idea del tavolo. Nel momento stesso in cui esce dalle mani dell’artefice manifesta la propria incompletezza.
In questo si gioca la differenza sostanziale fra le copie prodotte dai mimetes e quelle create dai demiurgoi. Le prime mirano a sostituirsi all’originale, rendendosi così autonome da esso, ma non riescono a eguagliarlo per cui risultano ingannevoli; le altre sono considerate da Platone più vicine al vero perché mantengono vivo il riferimento all’originale. In definitiva, quindi, le copie prodotte dall’artigiano illudono, ma non ingannano, si rapportano a ciò che è reale esibendo la loro dipendenza da esso. Queste sono sempre parziali e incomplete, non bastano a se stesse, poiché non possiedono un criterio di autenticità che permetta loro di rendersi autonome: la loro veridicità dipende da ciò che è altro.
- Copie originali
Da quanto detto fin qui possiamo osservare che la distinzione platonica fra mimesis estetica e mimesis poietica ci permette di mettere a fuoco una duplice relazione fra copia e originale che si esprime sia sul campo estetico percettivo che su quello pratico funzionale. Secondo il filosofo in entrambi i casi la copia risulta inferiore all’originale, nel primo perché l’immagine è pura apparenza, inganno dell’occhio, nel secondo perché l’oggetto riprodotto non è all’altezza del modello. Per Platone l’inferiorità della copia è insita nella natura dell’imitazione, la quale non riuscendo mai a rendersi autonoma dal proprio referente, si pone sempre in posizione servile rispetto a esso. Il pensiero platonico, ipotizzando di sfondo un modello originario di natura ideale a cui ogni tipo di rappresentazione deve riferirsi, si libera dal sospetto di una copia uguale o addirittura superiore all’originale.
Tuttavia il discorso si può considerare tutt’altro che concluso. Se prendiamo in considerazione i dispositivi di rappresentazione del corpo umano esposti sopra, come ad esempio l’androide che simula un busto femminile, detto Alice, o l’avatar della mano possiamo osservare come fra copia e originale si istauri un rapporto nuovo, che per certi versi sfugge all’analisi platonica.
Il dispositivo chiamato ‘Alice’ non si pone come un sostituto di un essere umano, il suo essere un artefatto è assolutamente visibile, dato che si tratta di un busto e dato che non svolge gran parte delle operazioni comunemente realizzate da un uomo. Per dirla con Platone potremmo definirlo il prodotto della mimesis poietica, dato che l’androide imita alcune espressioni tipiche della mimica facciale propria degli esseri umani. La sua funzione e il suo effetto quindi non è quello di ingannarci, o di farci sbagliare. L’osservatore è costantemente consapevole che ha di fronte una macchina, una copia del proprio corpo, in ogni caso si riconosce in essa. L’atto di riconoscersi in qualche cosa che palesemente esibisce la sua alterità, a mio parere, sconvolge la comune relazione fra copia e originale, e per certi versi ne sovverte la gerarchia. Nel rapportarci a una macchina che imita le nostra mimica facciale, non provando alcuna sensazione, siamo portati in un primo momento a sospettare che la macchina stia effettivamente esprimendo un sentimento, ma al contempo escludiamo categoricamente quest’idea. Il coinvolgimento emotivo si fonde alla consapevolezza razionale che il freddo macchinario non è un essere vivente. La macchina, per così dire, gioca a carte scoperte, eppure l’efficacia della sua azione non viene meno. Paradossalmente siamo noi che attribuiamo alla copia un senso e un significato che questa non può autonomamente suscitare, sperimentiamo così su di noi la tendenza e la tentazione all’autoinganno.
La mimica facciale riprodotta da Alice si discosta da quella proposta da un attore, o dal poeta contro cui si scagliava Platone. Questi infatti sono uomini che imitano volontariamente un’azione o un comportamento umano, immedesimandosi nei personaggi del dramma riproducendo artificialmente espressioni caratteristiche. La macchina invece esprime ciò che non le è proprio, imitando e riproducendo un comportamento che non le appartiene.
La tradizionale relazione gerarchica fra copia e originale si destruttura, non è più la copia a ingannarci sostituendosi all’originale, siamo noi fruitori e produttori volontari dell’illusione.
Ma non è tutto. Per comprendere in modo più approfondito in che senso un sistema di rappresentazione del corpo umano come Alice costituisca un cambiamento nella relazione copia-originale dobbiamo descrivere l’utilizzo di questa macchina. Un dispositivo del genere non è costruito per fini ludici, la sua funzione principale non è certo quella di meravigliare o stupire uno spettatore curioso, ma risponde a un fine sperimentale terapeutico volto alla cura dell’autismo. Come è noto, i soggetti autistici manifestano notevoli difficoltà a relazionarsi con gli altri, molto spesso risulta complesso anche per lo stesso terapeuta entrare interagire, mentre sono particolarmente attratti dalle macchine. Un automa capace di interpretare e processare informazioni attraverso sensori-motori, capace di riprodurre e di imitare espressioni tipiche della mimica facciale, può rappresentare un aiuto comportamentale significativo[11].
La cosa filosoficamente interessante è che in questo caso la macchina potrebbe risultare più efficace dello stesso terapeuta nell’istaurare una prima ed elementare relazione comunicativa. Per ritornare alla nostra indagine iniziale sul dominio delle copie possiamo osservare, con i dovuti accorgimenti legati alla situazione specifica, che ci troviamo di fronte a una copia (Alice) che può risultare in determinati casi superiore allo stesso originale (terapeuta). Non si tratta di un sostituto, la macchina non sta al posto del medico, al contrario essa svolge un’azione efficace proprio perché è una macchina e non un uomo.
Una considerazione analoga si può fare sull’avatar della mano. Anche in questo caso ci troviamo di fronte a un complesso sistema che in sintesi imita il comportamento di un arto umano, riproducendone i movimenti in visualizzazione tridimensionale sullo schermo di un computer. Quello che lo sperimentatore può osservare dunque non è la propria mano la sua riproduzione tridimensionale, in breve una sua copia. La mano riprodotta è visibilmente una copia, non può in nessun modo essere scambiata per reale, tuttavia questa immagine mobile restituisce in tempo reale tutti i movimenti che lo sperimentatore compie. Osservando l’arto attraverso lo schermo l’osservatore è ovviamente consapevole che ha di fronte una riproduzione del proprio corpo, in ogni caso riconosce in essa i suoi movimenti. Anche in questo caso quindi la copia esibendo la propria artificialità non perde in efficacia anzi, potremmo aggiungere che risulta maggiormente persuasiva.
In merito a ciò va sottolineato che anche questo strumento mimetico è stato ideato a scopo terapeutico. Vedere il movimento riprodotto tridimensionalmente in uno schermo può agire efficacemente sulla presa di coscienza sul funzionamento, più o meno adeguato allo scopo, dei nostri arti ed essere applicato soprattutto nei casi di riabilitazione motoria.
Da quanto è stato detto fin qui si può osservare come le nuove forme di rappresentazione del corpo umano ci spingano a ridefinire i concetti di ‘copia’ e di ‘originale’ di stampo platonico su cui ancora riposano le nostre certezze. Le ‘nuove’ copie non sono specchi che rimandano costantemente la nostra immagine confermandola, ma strumenti che, in alcuni casi, ci permettono di vedere meglio noi stessi. Il rapporto gerarchico fra copia e originale viene meno nel momento in cui le copie, non adeguandosi perfettamente al modello e quindi forzando i vincoli relazionali determinati, possono generare comportamenti non prevedibili.
Le copie di cui ci serviamo e che fanno parte del nostro mondo non sono semplici oggetti al nostro servizio, ma rappresentano strumenti che ci spingono costantemente a ridisegnare le nostre mappe cognitive. Detto in altri termini le copie non rappresentano né artifici demoniaci, ma neanche oggetti semplicemente asserviti ai nostri scopi. La frequenza d’uso e la diffusione di un certo strumento ne ridefiniscono l’ambito di pertinenza e il dominio; al contempo agiscono retroattivamente sul fruitore modificandolo. Dicendo questo, non intendo alimentare timori e inquietudini da letteratura fantascientifica, mi limito a considerare che quanto più le nostre vite, le nostre azioni e relazioni faranno uso di copie, riproduzioni, cloni, tanto più dovremmo essere pronti a ridefinirne il campo d’applicazione e il nostro stesso modo di vedere noi stessi.
Perché le copie ci guardano con altri occhi.
[1] Discorso di fine anno di Raul Castro, disponibile in rete su http://www.pcc.cu/ .
[2] Plinio, Naturalis historia, XXXV, 65.
[3] Cfr. Empedocle, B23DK, v. 9. Sulla pittura in Grecia come tecnica dell’illusione cfr. E. Keuls, Plato and the greek painting, Brill, Leiden 1978; A. Rouveret, Histoire et imaginaire de la peinture ancienne, Ecole française de Rome, Roma 1989, pp. 166-201.
[4] Platone, Repubblica, X 596b-e.
[5] Platone, Repubblica, X 596e-597b.
[6] Ibid.
[7] G. Cambiano, Platone e le tecniche, Laterza, Roma-Bari 1991, pp. 231-234.
[8] Platone, Repubblica, X 597e.
[9] Ibid., X 605a.
[10] Cfr. A. M. Iacono, Autonomia, potere, minorità, Feltrinelli, Milano 2000, pp. 106-108.
[11] A. Fornai, S. Casalini, M. Ferro, G. Pioggia, M. L. Sica, D. De Rossi, Robotic Action Learning, in «Teoria», XXVII, 2007/2, (Terza Serie II/2), Edizioni ETS Pisa, pp. 72-78.





